制御工学では、フィードバック制御を中心に学習します
この記事では、フィードバック制御系の構成、フィードバック系の分類や欠点について解説します
フィードバック制御系とは
フィードバック制御系とは、ある出力(制御量)とを入力(目標値)を比較して、その値の差(誤差)を無くし、常に一致するようにするシステムです
フィードバック制御系の構成は以下のようになります
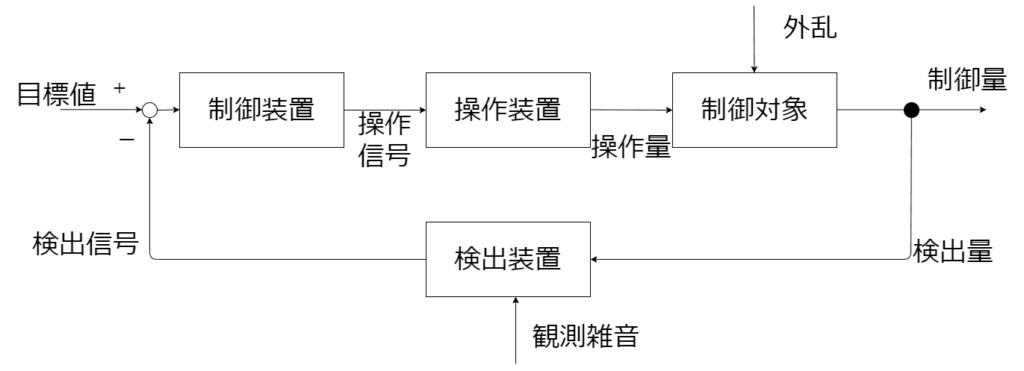
各信号の意味は以下の通りになります
目標値・・・外部からの命令、入力信号
操作信号・・・操作装置への支持信号
操作量・・・操作装置の出力量
外乱・・・制御対象が外部から受ける干渉
制御量・・・制御したい値、出力信号
検出量・・・制御対象から検出される値
観測雑音・・・検出装置が外部から受ける干渉
検出信号・・・検出部から得られる信号
フィードバック制御系の例
さきほどの説明だけだと、少し抽象的で分かりにくいかもしれませんので、例を挙げてみます
水槽の温度設定

熱帯魚などを飼育するための水槽の温度設定にも、フィードバック制御が使われています
目標値は、設定温度、制御装置は温度調節器、操作装置は、ヒータ、制御対象は水槽の温度、検出装置は温度検出器になります
考えられる外乱としては、外気などがあります
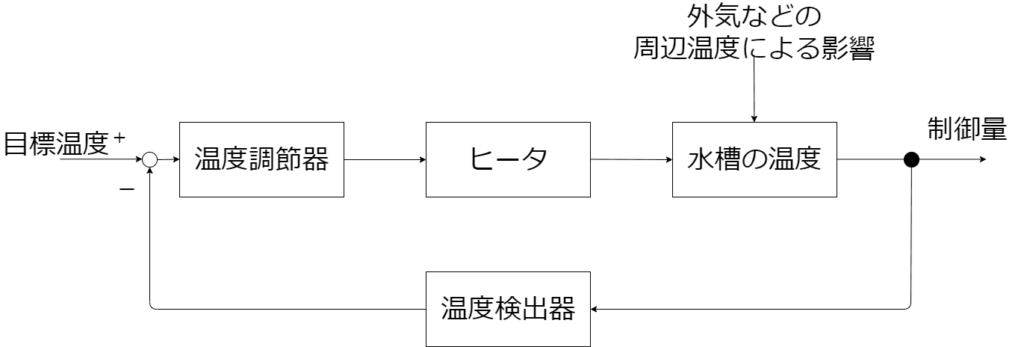
「温度検出器から得られた温度と目標温度の比較をし、水槽の温度を変えられるヒータの制御を行い、また温度検出器で目標温度と比較をする」という作業を繰り返すことで、常に水槽の温度を一定に保とうとしています
フィードバック制御の分類
フィードバック制御は、目標値、制御量、信号の種類による分類ができます
目標値による分類
定値制御・・・目標値が時間によって変化しない
追従制御・・・目標値が時間によって変化する
プログラム制御・・・目標値が決まった通りに変化する
制御量による分類
制御量がどのような物理量かによって分類する方法です
サーボ機構・・・制御量が角度、位置などのフィードバック制御系
自動調整系・・・制御量が速度、電圧などのフィードバック制御系
プロセス制御・・・制御量が温度、圧力などのフィードバック制御系
信号の種類による分類
アナログ制御・・・信号が連続的なフィードバック制御系
デジタル制御・・・信号が離散的なフィードバック制御系
フィードバック制御の欠点
フィードバック制御は、操作量に対しての結果を観察してから修正をしてくため、外乱が発生してもその影響が発生してから修正します
ですので、外乱が発生してから修正するまでにタイムラグが発生します
先ほどの例ですと、室温が変化したとしても、それが影響で水槽の温度が変化するまでは、何も修正しないということになります
よって、修正動作が後追いになってしまうため、外乱の影響をそのまま受けることになります
これがフィードバック制御の欠点です
フィードバック制御のこの欠点を補っている、フィードフォワード制御というものがあります
【参考】
http://chemexblog.blogspot.com/2012/07/an-analysis-of-positive-feedback-and.html
https://e-sysnet.com/seigyo/#toc5
https://udemy.benesse.co.jp/data-science/ai/feedback-control.html