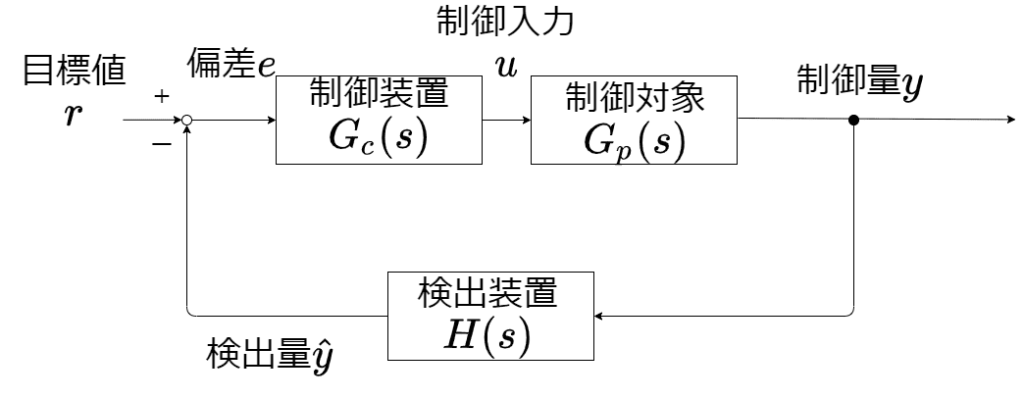
以下のようなフィードバック制御系を考えます
開ループ伝達関数、閉ループ伝達関数、一巡伝達関数をそれぞれ\(W_{o}(s)~,~W_{c}(s)~,~W_{r}(s)\)として、数式で表すと
$$\begin{align*}
W_{o}(s) &= G_{c}(s)G_{p}(s)\\
W_{c}(s) &= \frac{G_{c}(s)G_{p}(s)}{1+G_{c}(s)G_{p}(s)H(s)}\\
W_{r}(s) &= G_{c}(s)G_{p}(s)H(s)
\end{align*}$$
のようになります
それぞれの伝達関数
それぞれの伝達関数についてもう少しだけ詳しく説明します
開ループ伝達関数
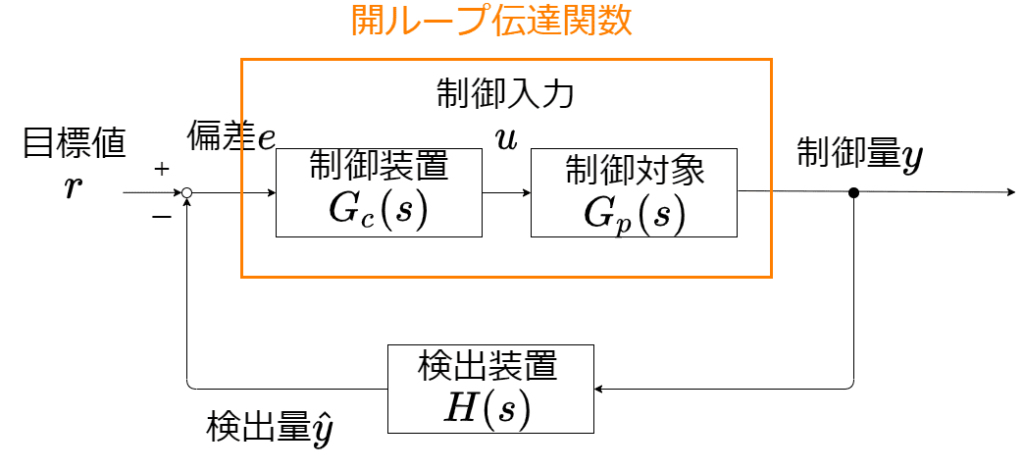
偏差\(e\)から制御量\(y\)までの開ループシステムの伝達関数を、開ループ伝達関数と呼びます
数式で表すと
$$W_{o}(s) = G_{c}(s)G_{p}(s)$$
のようになります
開ループ伝達関数は、システムの基本特性を知るために使用されます
また、開ループ伝達関数はとてもシンプルであるため、フィードバック制御系に問題があったときは、最初に開ループ系に問題がないかを調べる場合があります
閉ループ伝達関数
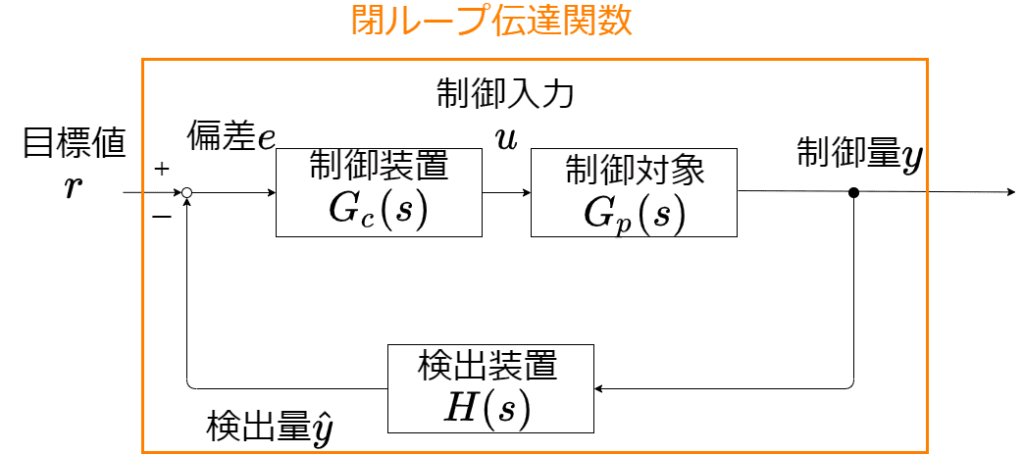
フィードバック系全体の伝達関数を、閉ループ伝達関数と呼びます
数式で表すと
$$W_{c}(s) = \frac{G_{c}(s)G_{p}(s)}{1+G_{c}(s)G_{p}(s)H(s)}$$
のようになります
閉ループ伝達関数は、フィードバック系全体の伝達関数であるため、フィードバック制御系の性能を評価するために使用されます
システムを厳正に評価できますが、式が複雑であるため、扱うのが大変というデメリットがあります
一巡伝達関数
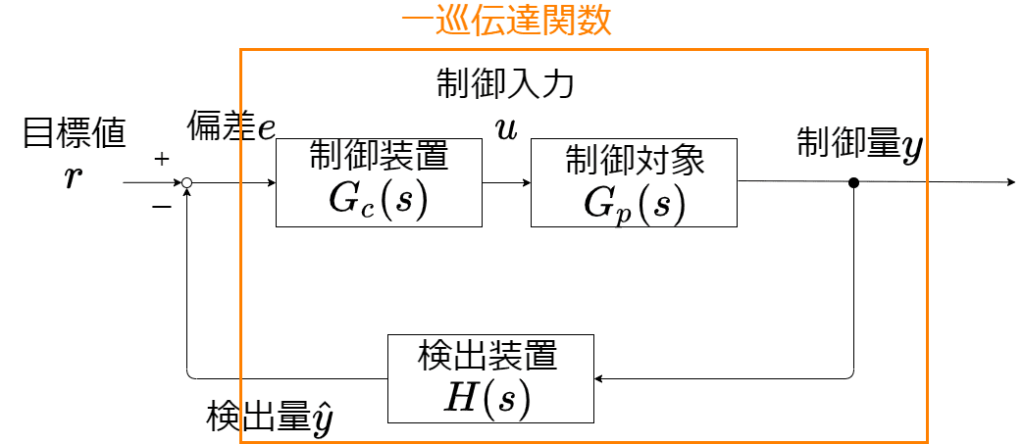
偏差\(e\)から検出量\(\hat{y}\)の伝達関数を、一巡伝達関数と呼びます
数式で表すと
$$W_{r}(s) = G_{c}(s)G_{p}(s)H(s)$$
のようになります
一巡伝達関数は、名前の通り、フィードバック系を一巡したらどうなるかを表した伝達関数です
主にシステムが安定かどうかを評価するために使用されます